Zhaoting Li
PhD Candidate at TU Delft
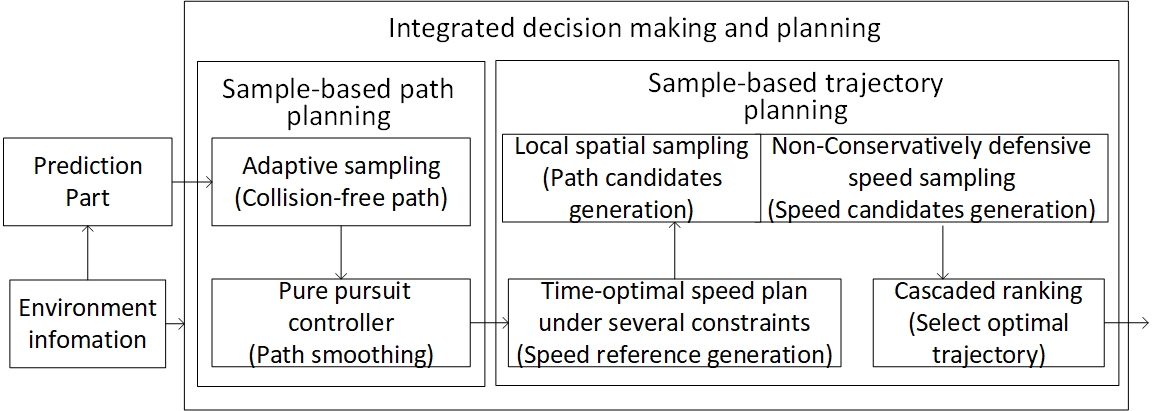
In this project, we designed a motion planning method for urban autonomous vehicles. This method have the advantages of fast sampling speed, time-bounded collison-free path generation and sampling-based decision making method.