PhD Candidate at TU Delft
Efficient Heuristic Generation for Robot Path planning
Efficient Heuristic Generation for Robot Path planning
- Advisor: Max Q.-H. Meng , IEEE Fellow and Professor in Department of Electrical and Electronic Engineering, SUSTech
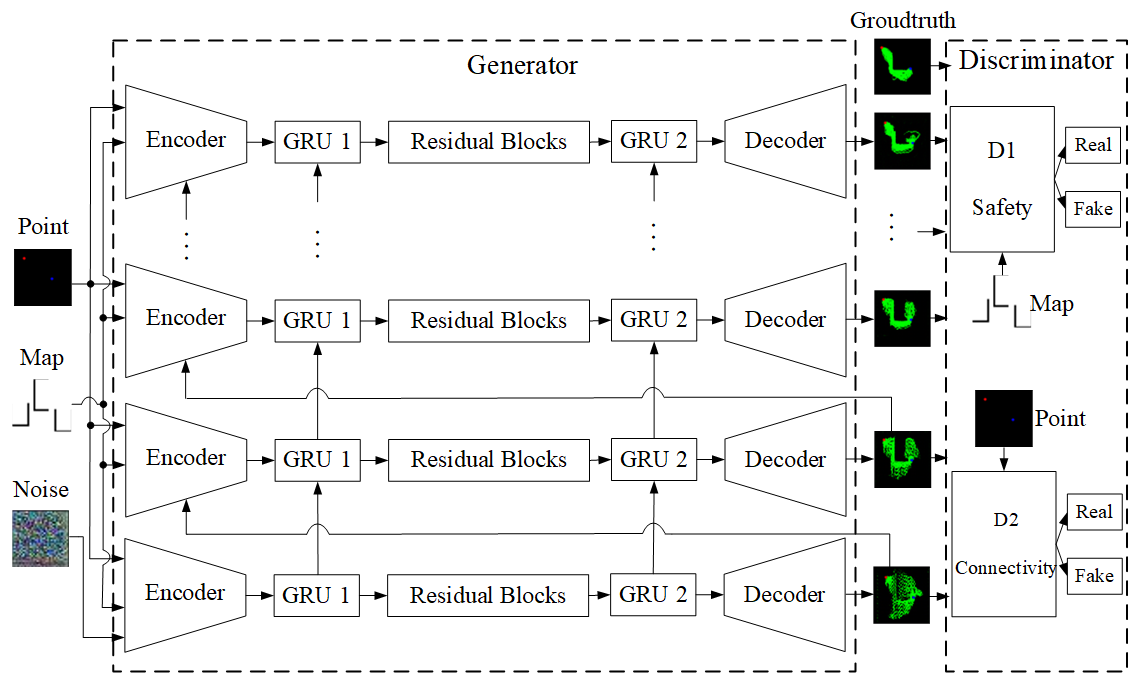
Robot path planning is difficult to solve due to the contradiction between the optimality of results and the complexity of algorithms, even in 2D environments. To find an optimal path, the algorithm needs to search all the state space, which costs many computation resources. To address this issue, we present a novel recurrent generative model (RGM), which generates efficient heuristic to reduce the search efforts of path planning algorithms. This RGM model adopts the framework of general generative adversarial networks (GAN), which consists of a novel generator that can generate heuristic by refining the outputs recurrently and two discriminators that check the connectivity and safety properties of heuristic. We test the proposed RGM module in various 2D environments to demonstrate its effectiveness and efficiency. The results show that, compared with a model without recurrence, the RGM successfully generates appropriate heuristic in both seen and new unseen maps with higher accuracy, demonstrating the good generalization ability of the RGM model. We also compare the rapidly-exploring random tree star (RRT) with generated heuristic and the conventional RRT in four different maps, showing that the generated heuristic can guide the algorithm to efficiently find both initial and optimal solutions in a faster and more efficient way.