Zhaoting Li
PhD Candidate at TU Delft
I am a second-year PhD candidate at the Department of Cognitive Robotics at TU Delft, where I work with Prof. Jens Kober and Prof. Cosimo Della Santina. My research focuses on robot learning, interactive imitation learning, and applying these techniques to real-world robotics problems, such as harvesting and performing everyday tasks.
zhaoting_li@outlook.com
Cognitive Robotics
TU Delft
Netherlands
Learning Robot Exploration Strategy with 4D Point-Clouds-like Information as Observations
2022
Zhaoting Li , T. Li, J. Wang, M. Q.-H. Meng
IEEE Robotics and Automation Letters,
7,
1,
Efficient Heuristic Generation for Robot Path Planning with Recurrent Generative Model
2021
Zhaoting Li , J. Wang, M. Q.-H. Meng
Proceedings of IEEE International Conference on Robotics and Automation (ICRA)
Adaptive sampling-based motion planning with a non-conservatively defensive strategy for autonomous driving
2020
Zhaoting Li , Wei Zhan, Liting Sun, Ching-Yao Chan, Masayoshi Tomizuka
Proceedings of IFAC 2020
A trajectory planning method for robot scanning system using mask R-CNN for scanning objects with unknown model
2021
Yipeng Yang, Zhaoting Li , Xinghu Yu, Zhan Li, Huijun Gao
Neurocomputing,
404,
1,
PhD candidate
CoR, TU Delft
2023.09 - current
M.S.C in Robotics, Systems and Control
ETH Zurich
2021.09 - 2023.06
Research Assitant (master program deferred due to covid-19)
Southern University of Science and Technology(SUSTech)
2020.07 - 2021.7
Visiting student researcher
Mechanical Systems Control Lab, UC Berkeley
2019.07 - 2019.09
B.Eng in Automation
Harbin Institute of Technology (HIT)
2016.09 - 2020.6
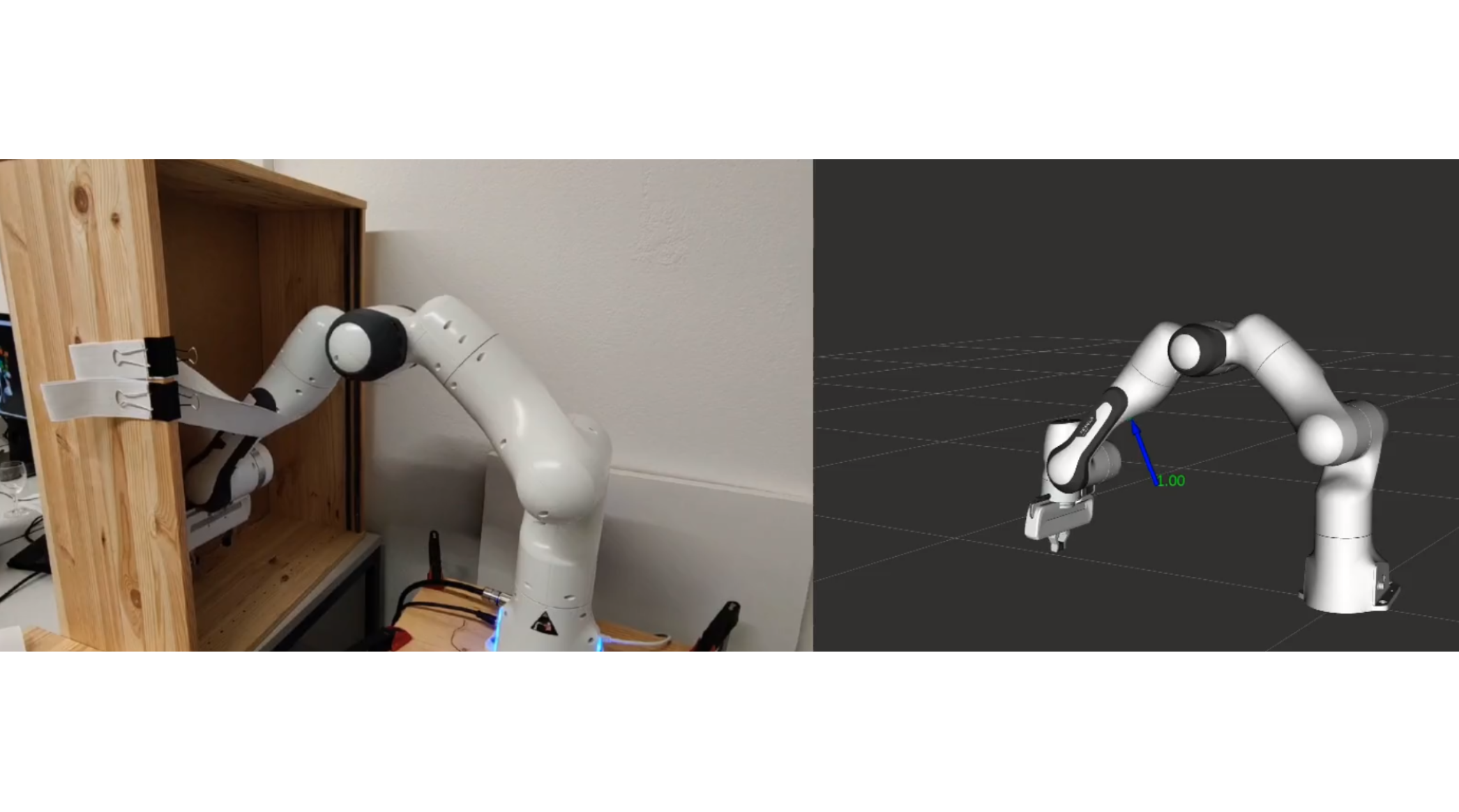
CARE: Contact Aware and Reactive Estimator for Contact-Rich Motion Planning 2022.10 - 2023.06
MSc thesis in Computational Robotics Lab (CRL), ETHz
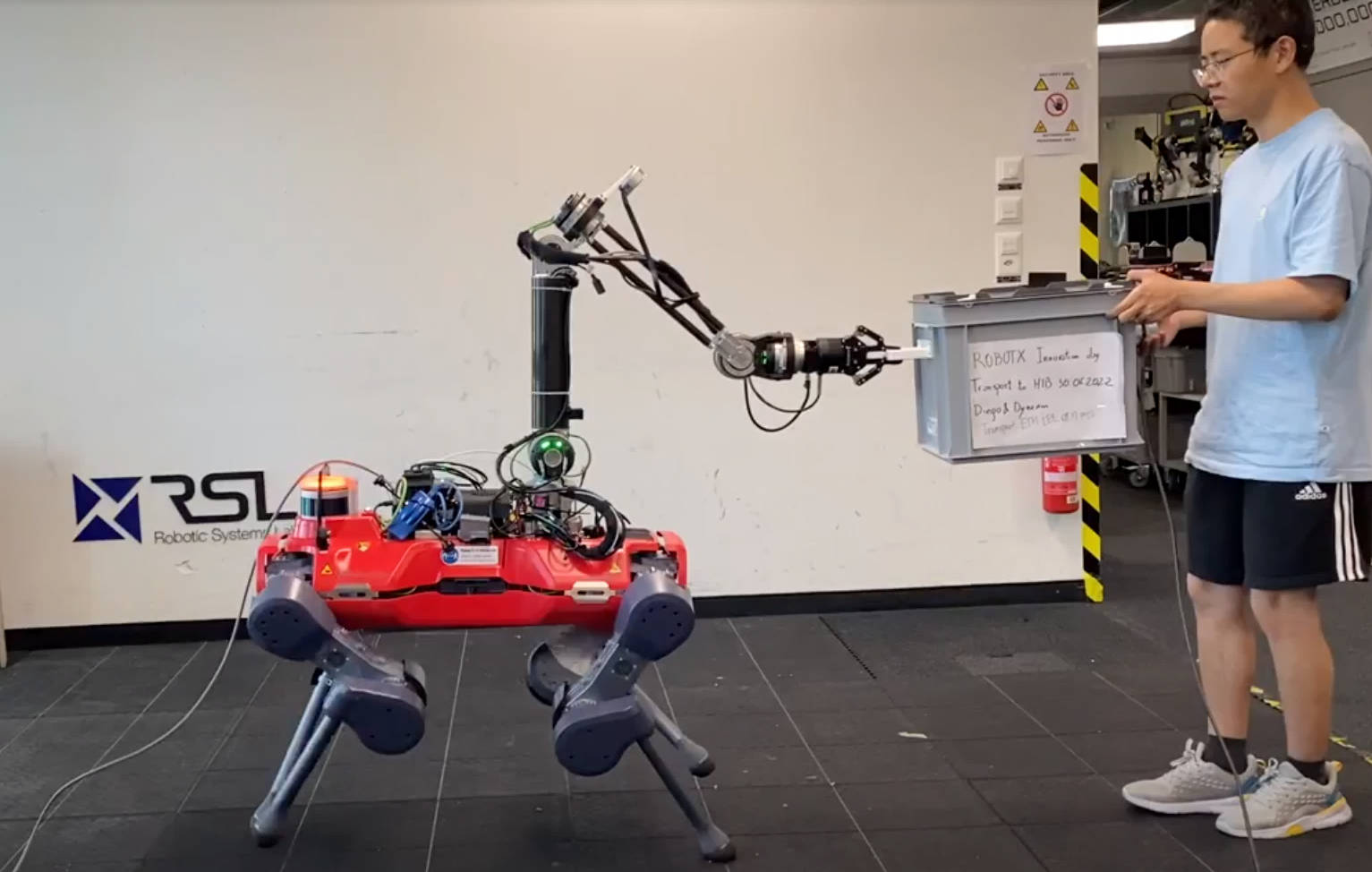
Learning haptic data processing in Human Robot Collaborative Carrying Task 2022.03 - 2022.08
semester project in Robotic System Lab (RSL), ETHz [Report]
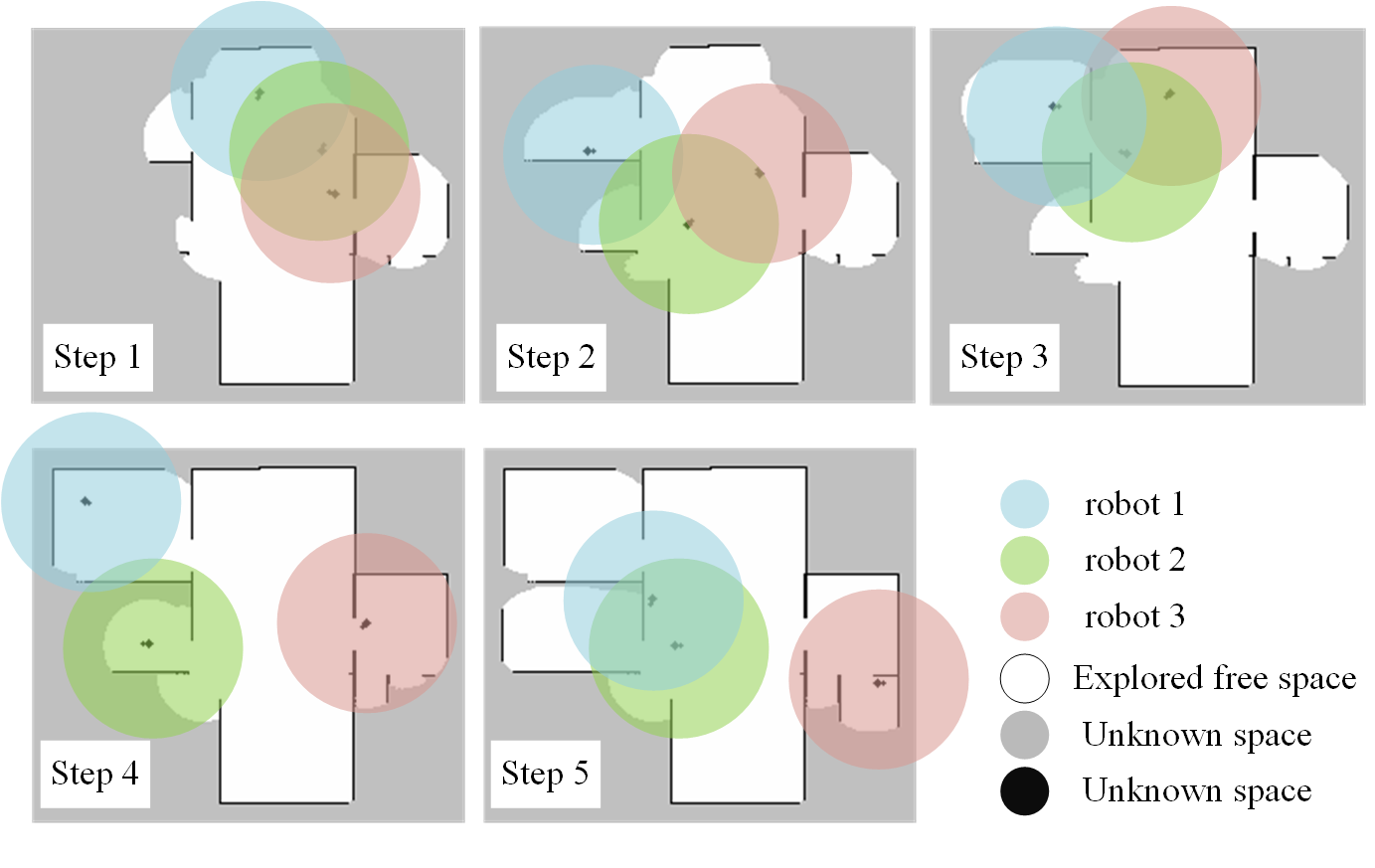
Learning Muti-Robot Exploration Strategy with Adaptive-QMIX algorithm 2021.10 - 2022.02
based on the robot exploration project
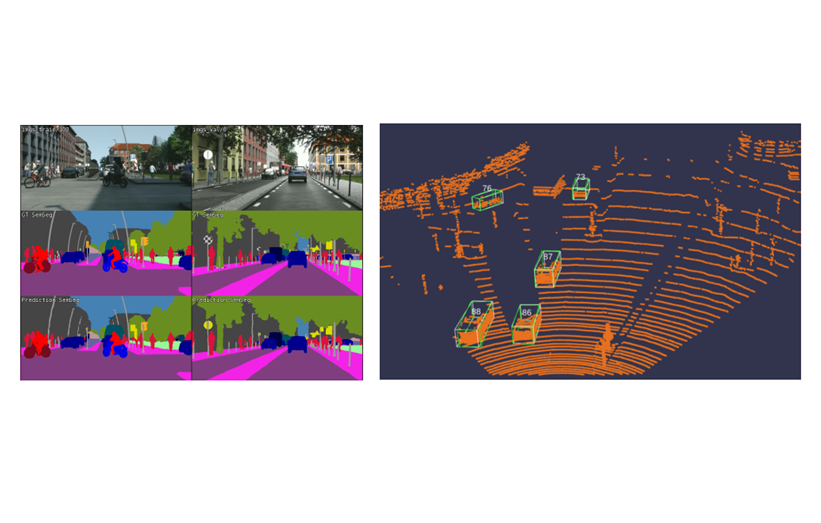
Deep Learning for Autonomous Driving: muti-tasking learning and 3D object detection 2022.04-2022.07
Course project of Deep learning for autonomous driving
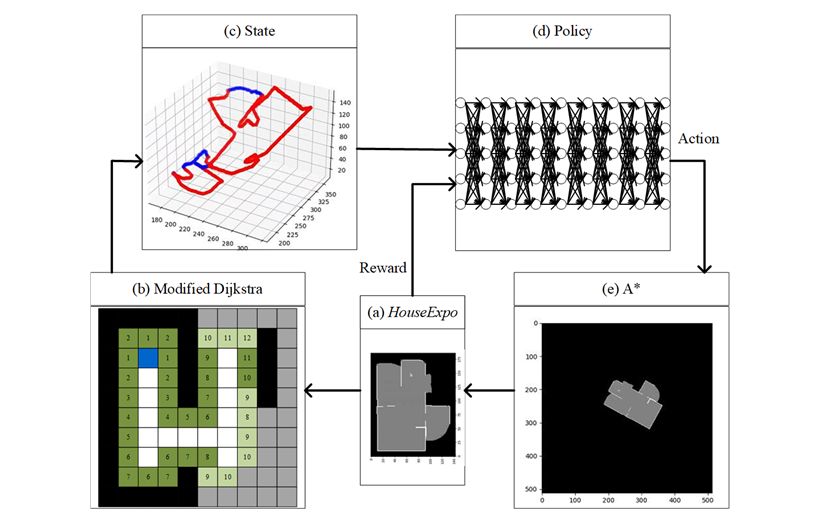
Learning Robot Exploration Strategy with Deep Reinforcement Learning 2020.10-2021.07
Research work at SUSTech, published at RA-L [paper].
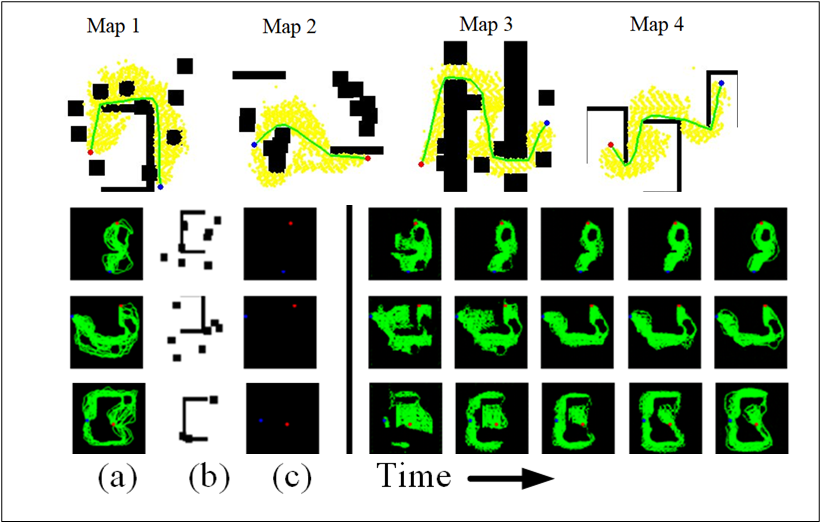
Efficient Heuristic Generation for Robot Path Planning 2020.07-2020.10
Research work at SUSTech, published at ICRA 2021 [paper].
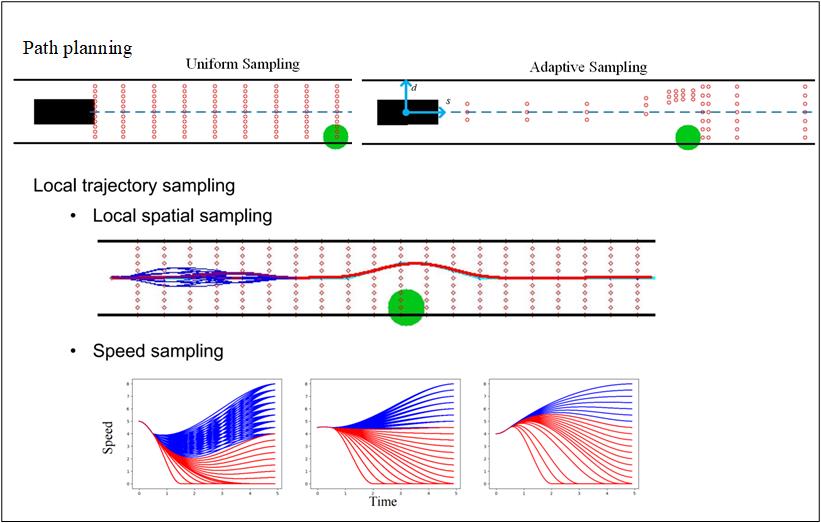
A sampling-based motion planning method for urban autonomous vehicles 2019.07-2020.01
Research work at UC Berkeley, published at IFAC 2020 [paper].
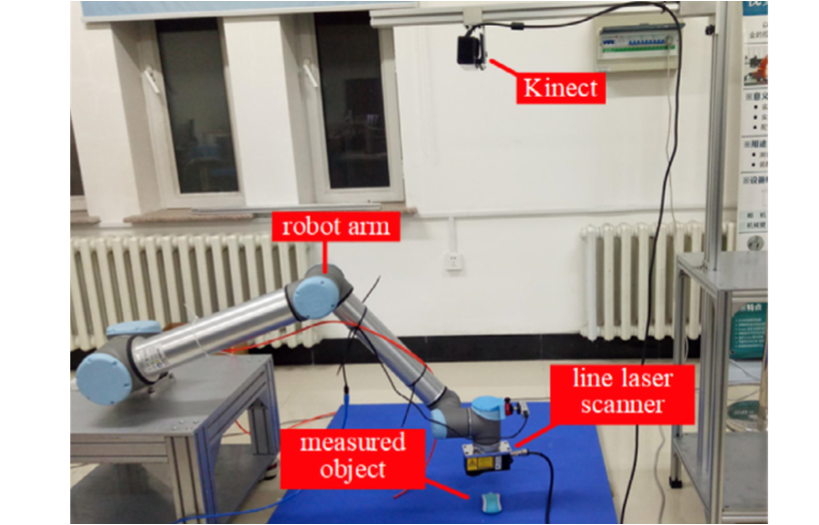
A trajectory planning method for robot scanning sytem for scanning objects with unknown model 2019.02-2019.06
Research work at HIT, published at Neurocomputing 2020 [paper].